


Changement de base
Passage de la base cylindrique à la base cartésienne
Le passage d'une base à une autre n'est qu'une histoire de projection de vecteurs. Il est déconseillé de tenter ces projections à partir d'une vue 3D : certaines perspectives sont trompeuses, les angles peuvent être représentés négativement et peuvent avoir des valeurs proches de 45° (risque de confusion sinus/cosinus).
Les projections doivent impérativement s'appuyer sur des figures planes de changement de base : vues 2D définissant un seul angle à la fois. Cet angle doit être positif, de valeur environ 30°.
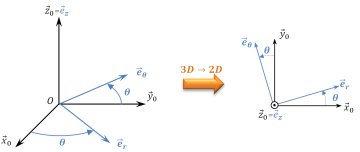
En s'appuyant sur la figure plane, on peut écrire les relations entre les différents vecteurs :

Remarque : Cas d'un solide en rotation autour d'un axe fixe
Nous avons vu dans la partie précédente que dans le cas d'un solide en rotation autour d'un axe fixe, le vecteur position est :
Connaissant désormais les composantes de la base cylindriques dans la base cartésiennes, plus précisément celle du vecteur
 , on peut exprimer le vecteur position dans la base cartésienne en fonction des paramètres cylindriques du mouvement :
, on peut exprimer le vecteur position dans la base cartésienne en fonction des paramètres cylindriques du mouvement :

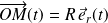
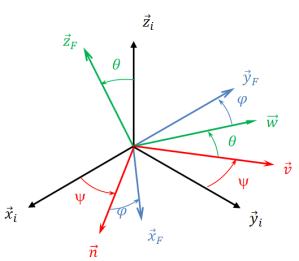
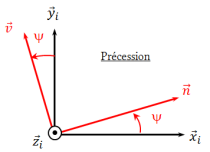
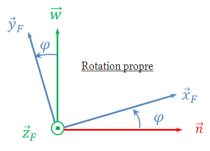
Cas général : les angles d'Euler
Dans le cas général, l'orientation d'une base par rapport à une autre peut nécessiter jusqu'à 3 paramètres géométriques angulaires. Le paramétrage d'Euler permet de passer d'une base initiale
|  |



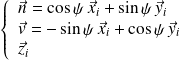
Les trois angles d'Euler
| 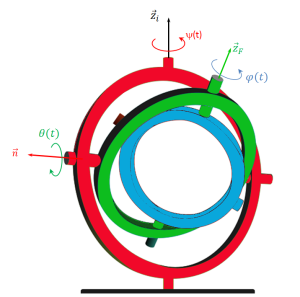 |




Pour exprimer les composantes des vecteurs de la base
 en fonction des vecteurs de la base
en fonction des vecteurs de la base
 , on réalise les 3 figures planes de changement de base. On détermine alors par projections successives et pour chaque rotation les composantes des vecteurs de la base d'arrivée dans la base de départ.
, on réalise les 3 figures planes de changement de base. On détermine alors par projections successives et pour chaque rotation les composantes des vecteurs de la base d'arrivée dans la base de départ.
|  |
|  |
|  |

Au final, on obtient :

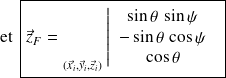
Ce résultat n'est pas à apprendre, mais la démarche permettant de le retrouver doit être maîtrisée.




