


Lois de mouvement - Lois horaires
Mouvement de translation rectiligne
Dans le cas d'un solide
 en mouvement de translation rectiligne de direction
en mouvement de translation rectiligne de direction
 dans le référentiel de référence
dans le référentiel de référence
 , un seul paramètre
, un seul paramètre
 suffit à connaître la position d'un point
suffit à connaître la position d'un point
 lié à
à tout instant :
lié à
à tout instant :

Dans le cas d'un accélération constante,
 , on peut déterminer par intégration la vitesse et la position du point
et établir les lois horaires du mouvement :
, on peut déterminer par intégration la vitesse et la position du point
et établir les lois horaires du mouvement :
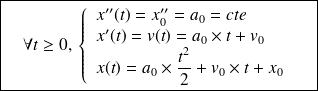
Remarque :
 et
et
 représentent respectivement la vitesse et la position initiales du point M, soit à l'instant à t=0 s.
représentent respectivement la vitesse et la position initiales du point M, soit à l'instant à t=0 s. Si
 , on parle de mouvement de translation rectiligne uniformément varié (accéléré ou décéléré).
, on parle de mouvement de translation rectiligne uniformément varié (accéléré ou décéléré).Si
 , on parle de mouvement de translation rectiligne uniforme.
, on parle de mouvement de translation rectiligne uniforme.

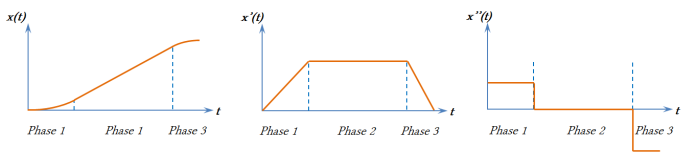
Les lois horaires permettent l'étude de la translation d'un solide dans le cadre d'une loi de vitesse en trapèze cumulant :
Phase 1 : mouvement de translation rectiligne uniformément accéléré.
Phase 2 : mouvement de translation rectiligne uniforme.
Phase 3 : mouvement de translation rectiligne uniformément décéléré.
L'étude d'un mouvement commençant à
 (cas des phases 2 et 3 par exemple) nécessite un changement de variable dans les équations horaires. Les équations horaires deviennent :
(cas des phases 2 et 3 par exemple) nécessite un changement de variable dans les équations horaires. Les équations horaires deviennent :
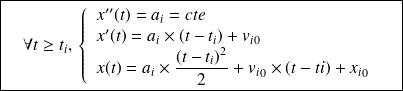
où
 et
et
 représentent respectivement la vitesse et la position initiales du point
pour la phase étudiée, soit à l'instant à
représentent respectivement la vitesse et la position initiales du point
pour la phase étudiée, soit à l'instant à
 .
.
Mouvement de rotation autour d'un axe fixe
Dans le cas d'un solide S en mouvement de rotation autour d'un axe fixe
 par rapport au référentiel de référence
, un seul paramètre
par rapport au référentiel de référence
, un seul paramètre
 suffit à connaître la position d'un point M lié à S à tout instant. Par analogie avec le mouvement rectiligne, on peut établir les équations horaires du mouvement :
suffit à connaître la position d'un point M lié à S à tout instant. Par analogie avec le mouvement rectiligne, on peut établir les équations horaires du mouvement :
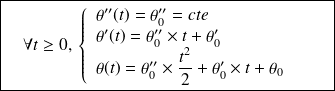
Remarque :
 et
et
 représentent respectivement la vitesse angulaire et la position angulaire initiales du point M, soit à l'instant à t=0 s.
représentent respectivement la vitesse angulaire et la position angulaire initiales du point M, soit à l'instant à t=0 s.
 représente l'accélération angulaire en
représente l'accélération angulaire en
 .
.On note souvent
 pour la vitesse angulaire. Ainsi,
pour la vitesse angulaire. Ainsi,
 ,
,
 et
et
 .
.Si
 , on parle de mouvement de rotation uniformément varié (accéléré ou décéléré).
, on parle de mouvement de rotation uniformément varié (accéléré ou décéléré).Si
 , on parle de mouvement de rotation uniforme.
, on parle de mouvement de rotation uniforme.Tout comme dans le cas du mouvement de translation, ces équations permettent l'étude des mouvement avec une loi de vitesse (angulaire) dite en trapèze.




