


Composition des mouvements
Composition du vecteur vitesse
Soit un solide
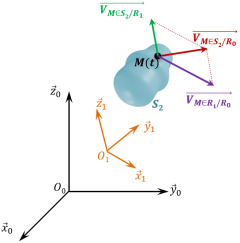
Pour tout point M appartenant au solide
|  |




Remarque :
 est appelé vecteur vitesse absolue ;
est appelé vecteur vitesse absolue ;
 est appelé vecteur vitesse relative ;
est appelé vecteur vitesse relative ;
 est appelé vecteur vitesse d'entraînement. Il correspond à la vitesse du point
est appelé vecteur vitesse d'entraînement. Il correspond à la vitesse du point
 imaginé fixe dans
imaginé fixe dans
 dans le mouvement de
dans le mouvement de
 par rapport à
par rapport à
 .
.
Complément : Démonstration
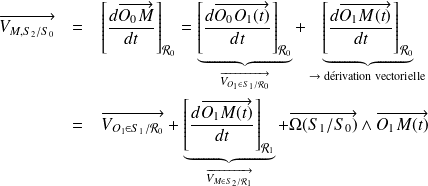
Or d'après le champ des vecteurs vitesses :

Ainsi :


Fondamental : Généralisation
La composition du vecteur vitesse peut se généraliser avec n solides :
Composition du vecteur taux de rotation
Fondamental :
Soient deux solides
et
 en mouvement par rapport à un solide
en mouvement par rapport à un solide
 . On a :
. On a :
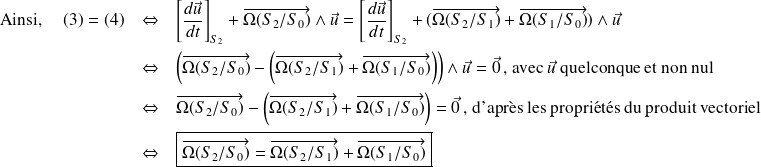
Complément : Démonstration
Soit un vecteur
 quelconque (non nul). Soient trois solides
quelconque (non nul). Soient trois solides
 et
en mouvements relatifs.
et
en mouvements relatifs.
 sont supposés non nuls.
sont supposés non nuls.
D'après la formule de la base mobile entre les base 1 et 0 et entre les bases 2 et 1 :
 et
et

Ainsi, en injectant (2) dans (1)

De plus, toujours d'après la formule de la base mobile mais cette fois entre les base 2 et 0 :

Fondamental :
La composition du vecteur taux de rotation peut se généraliser avec n solides :
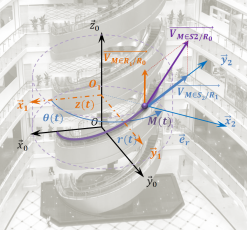
Cas du mouvement hélicoïdal
Un mouvement hélicoïdal est la combinaison d'une rotation autour d'un axe fixe et d'un translation rectiligne de même axe. : Soit
Soit
|  |










Ainsi en composant les mouvement de
 et de
et de
 on peut déterminer le vecteur taux de rotation et le vecteur vitesse d'un point
on peut déterminer le vecteur taux de rotation et le vecteur vitesse d'un point
 dans le mouvement hélicoïdal d'axe
dans le mouvement hélicoïdal d'axe
 de
par rapport au repère de référence
:
de
par rapport au repère de référence
:

et donc :

Soit :

La trajectoire d'un point quelconque du solide S en mouvement hélicoïdal autour d'un axe fixe par rapport à un repère R est une hélice circulaire dont l'axe correspond à celui de la rotation et de la translation.




